Note
Go to the end to download the full example code.
New grid systems: Plus codes, Maidenhead, and GARS.#
This example demonstrates the new grid systems added to M3S: Plus codes (Open Location Code), Maidenhead locator system, and GARS (Global Area Reference System).
Testing coordinates: 37.7749, -122.4194 (San Francisco)
============================================================
1. Plus codes (Open Location Code)
----------------------------------------
Plus code: 48V9+HQJF
Cell area: 0.0611 km²
Precision: 4
Number of neighbors: 8
2. Maidenhead Locator System
----------------------------------------
Maidenhead locator: CM87SS
Cell area: 33.9295 km²
Precision: 3
Number of neighbors: 8
3. GARS (Global Area Reference System)
----------------------------------------
GARS identifier: 116JV3
Cell area: 609.8944 km²
Precision: 2
Number of neighbors: 8
4. Bounding Box Queries
----------------------------------------
Bounding box: (37.67, -122.52) to (37.87, -122.32)
Plus codes cells in bbox: 6561
Maidenhead cells in bbox: 20
GARS cells in bbox: 4
5. Precision Comparison
----------------------------------------
Plus codes:
Precision 1: 48 (area: 3746070.4678 km²)
Precision 2: 48V9+ (area: 9806.4958 km²)
Precision 3: 48V9+HQ (area: 24.4282 km²)
Precision 4: 48V9+HQJF (area: 0.0611 km²)
Maidenhead:
Precision 1: CM (area: 2030598.6063 km²)
Precision 2: CM87 (area: 19612.7501 km²)
Precision 3: CM87SS (area: 33.9295 km²)
Precision 4: CM87SS95 (area: 0.3393 km²)
GARS:
Precision 1: 116JV (area: 2443.7115 km²)
Precision 2: 116JV3 (area: 609.8944 km²)
Precision 3: 116JV37 (area: 67.8402 km²)
6. GeoDataFrame Integration
----------------------------------------
Plus codes intersect result: 1 cells
Cell ID: 48V9+HQJF
Maidenhead intersect result: 1 cells
Cell ID: CM87SS
GARS intersect result: 1 cells
Cell ID: 116JV3
=== Creating Grid Systems Visualization ===
/home/runner/work/m3s/m3s/examples/new_grids_example.py:286: UserWarning: Attempting to set identical low and high ylims makes transformation singular; automatically expanding.
ax3.set_ylim(0, max(cell_counts) * 1.1)
Grid comparison plots saved as 'new_grids_comparison.png'
=== Creating Precision Evolution Plots ===
Precision evolution plots saved as 'precision_evolution.png'
=== Creating Global Coverage Examples ===
Global coverage plots saved as 'global_coverage.png'
============================================================
New Grids Example completed successfully!
Generated visualization files:
- new_grids_comparison.png
- precision_evolution.png
- global_coverage.png
============================================================
import geopandas as gpd
import matplotlib.pyplot as plt
from shapely.geometry import Point
from m3s import GARSGrid, MaidenheadGrid, PlusCodeGrid
def main():
"""Demonstrate the new grid systems."""
# Test coordinates (San Francisco)
lat, lon = 37.7749, -122.4194
print(f"Testing coordinates: {lat}, {lon} (San Francisco)")
print("=" * 60)
# Plus codes (Open Location Code)
print("\n1. Plus codes (Open Location Code)")
print("-" * 40)
pluscode_grid = PlusCodeGrid(precision=4)
pluscode_cell = pluscode_grid.get_cell_from_point(lat, lon)
print(f"Plus code: {pluscode_cell.identifier}")
print(f"Cell area: {pluscode_cell.area_km2:.4f} km²")
print(f"Precision: {pluscode_cell.precision}")
# Get neighbors
neighbors = pluscode_grid.get_neighbors(pluscode_cell)
print(f"Number of neighbors: {len(neighbors)}")
# Maidenhead locator system
print("\n2. Maidenhead Locator System")
print("-" * 40)
maidenhead_grid = MaidenheadGrid(precision=3)
maidenhead_cell = maidenhead_grid.get_cell_from_point(lat, lon)
print(f"Maidenhead locator: {maidenhead_cell.identifier}")
print(f"Cell area: {maidenhead_cell.area_km2:.4f} km²")
print(f"Precision: {maidenhead_cell.precision}")
# Get neighbors
neighbors = maidenhead_grid.get_neighbors(maidenhead_cell)
print(f"Number of neighbors: {len(neighbors)}")
# GARS (Global Area Reference System)
print("\n3. GARS (Global Area Reference System)")
print("-" * 40)
gars_grid = GARSGrid(precision=2)
gars_cell = gars_grid.get_cell_from_point(lat, lon)
print(f"GARS identifier: {gars_cell.identifier}")
print(f"Cell area: {gars_cell.area_km2:.4f} km²")
print(f"Precision: {gars_cell.precision}")
# Get neighbors
neighbors = gars_grid.get_neighbors(gars_cell)
print(f"Number of neighbors: {len(neighbors)}")
# Demonstrate bbox functionality
print("\n4. Bounding Box Queries")
print("-" * 40)
# Small bounding box around the test point
min_lat, min_lon = lat - 0.1, lon - 0.1
max_lat, max_lon = lat + 0.1, lon + 0.1
print(
f"Bounding box: ({min_lat:.2f}, {min_lon:.2f}) to ({max_lat:.2f}, {max_lon:.2f})"
)
# Get cells in bbox for each grid system
pluscode_cells = pluscode_grid.get_cells_in_bbox(min_lat, min_lon, max_lat, max_lon)
maidenhead_cells = maidenhead_grid.get_cells_in_bbox(
min_lat, min_lon, max_lat, max_lon
)
gars_cells = gars_grid.get_cells_in_bbox(min_lat, min_lon, max_lat, max_lon)
print(f"Plus codes cells in bbox: {len(pluscode_cells)}")
print(f"Maidenhead cells in bbox: {len(maidenhead_cells)}")
print(f"GARS cells in bbox: {len(gars_cells)}")
# Demonstrate different precisions
print("\n5. Precision Comparison")
print("-" * 40)
print("Plus codes:")
for precision in range(1, 5):
grid = PlusCodeGrid(precision=precision)
cell = grid.get_cell_from_point(lat, lon)
print(
f" Precision {precision}: {cell.identifier} (area: {cell.area_km2:.4f} km²)"
)
print("\nMaidenhead:")
for precision in range(1, 5):
grid = MaidenheadGrid(precision=precision)
cell = grid.get_cell_from_point(lat, lon)
print(
f" Precision {precision}: {cell.identifier} (area: {cell.area_km2:.4f} km²)"
)
print("\nGARS:")
for precision in range(1, 4):
grid = GARSGrid(precision=precision)
cell = grid.get_cell_from_point(lat, lon)
print(
f" Precision {precision}: {cell.identifier} (area: {cell.area_km2:.4f} km²)"
)
# GeoDataFrame integration example
print("\n6. GeoDataFrame Integration")
print("-" * 40)
# Create a simple GeoDataFrame with a point
gdf = gpd.GeoDataFrame(
{"name": ["San Francisco"], "geometry": [Point(lon, lat)]}, crs="EPSG:4326"
)
# Intersect with different grid systems
pluscode_result = pluscode_grid.intersects(gdf)
maidenhead_result = maidenhead_grid.intersects(gdf)
gars_result = gars_grid.intersects(gdf)
print(f"Plus codes intersect result: {len(pluscode_result)} cells")
if len(pluscode_result) > 0:
print(f" Cell ID: {pluscode_result.iloc[0]['cell_id']}")
print(f"Maidenhead intersect result: {len(maidenhead_result)} cells")
if len(maidenhead_result) > 0:
print(f" Cell ID: {maidenhead_result.iloc[0]['cell_id']}")
print(f"GARS intersect result: {len(gars_result)} cells")
if len(gars_result) > 0:
print(f" Cell ID: {gars_result.iloc[0]['cell_id']}")
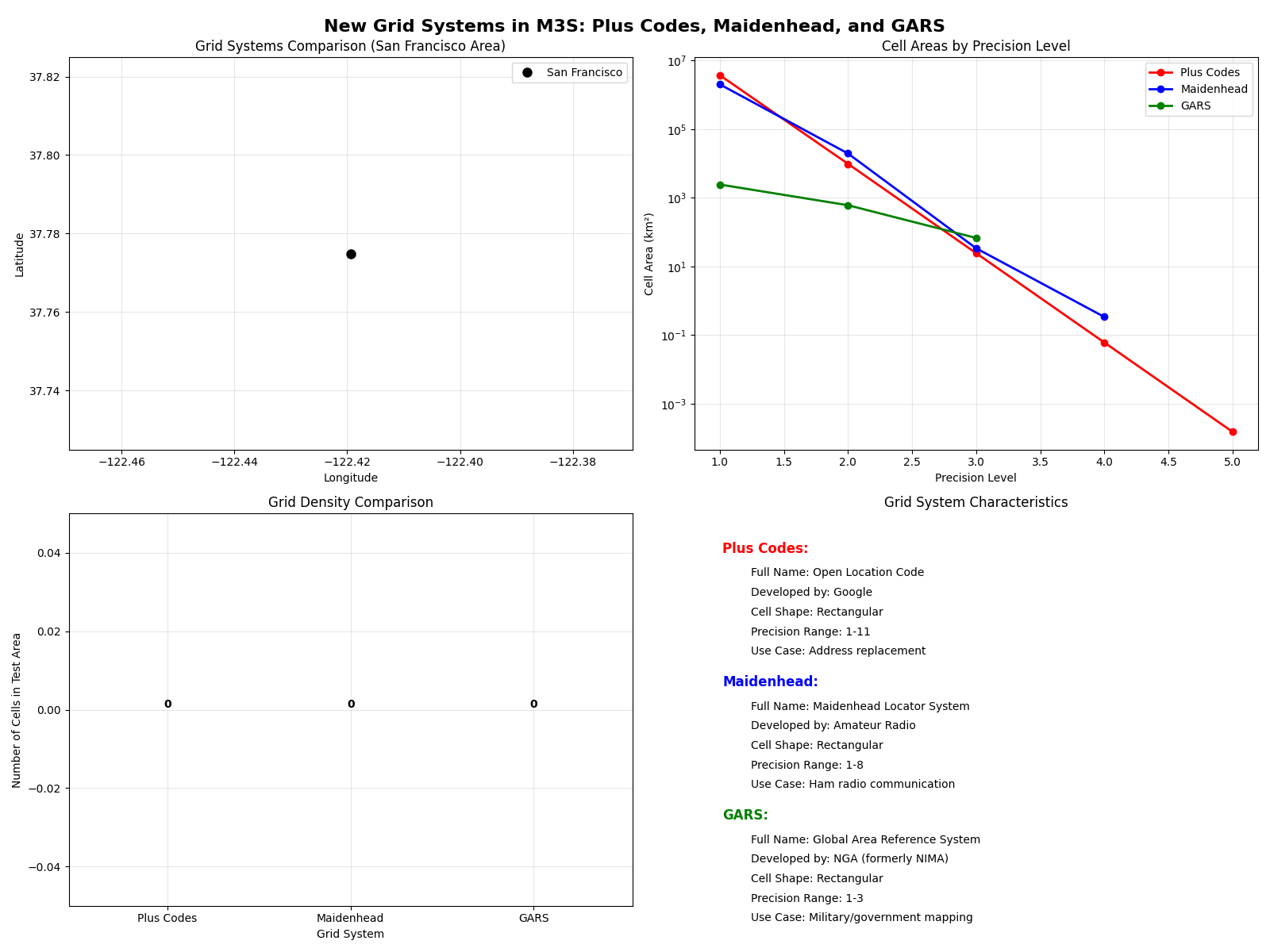
def plot_grid_systems_comparison():
"""Create comprehensive plots comparing the new grid systems."""
print("\n=== Creating Grid Systems Visualization ===")
# Test coordinates (San Francisco)
center_lat, center_lon = 37.7749, -122.4194
# Define visualization area around San Francisco
offset = 0.05 # Larger area for better visualization
bounds = (
center_lon - offset,
center_lat - offset,
center_lon + offset,
center_lat + offset,
)
# Create grid instances with different precisions for visualization
grids = {
"Plus Codes": PlusCodeGrid(precision=3),
"Maidenhead": MaidenheadGrid(precision=3),
"GARS": GARSGrid(precision=2),
}
# Create figure with subplots
fig, axes = plt.subplots(2, 2, figsize=(16, 12))
fig.suptitle(
"New Grid Systems in M3S: Plus Codes, Maidenhead, and GARS",
fontsize=16,
fontweight="bold",
)
# Plot 1: Grid systems overlay comparison
ax1 = axes[0, 0]
ax1.set_title("Grid Systems Comparison (San Francisco Area)")
ax1.set_xlabel("Longitude")
ax1.set_ylabel("Latitude")
colors = ["red", "blue", "green"]
alphas = [0.6, 0.4, 0.3]
# Plot each grid system
for i, (name, grid) in enumerate(grids.items()):
try:
cells = grid.get_cells_in_bbox(*bounds)
if cells:
# Create GeoDataFrame for plotting
cell_data = []
for cell in cells[:25]: # Limit for visibility
cell_data.append({"geometry": cell.polygon, "system": name})
if cell_data:
gdf = gpd.GeoDataFrame(cell_data)
gdf.boundary.plot(
ax=ax1,
color=colors[i],
alpha=alphas[i],
linewidth=1.5,
label=name,
)
except Exception as e:
print(f"Warning: Could not plot {name}: {e}")
# Add center point
ax1.plot(center_lon, center_lat, "ko", markersize=8, label="San Francisco")
ax1.legend()
ax1.set_xlim(bounds[0], bounds[2])
ax1.set_ylim(bounds[1], bounds[3])
ax1.grid(True, alpha=0.3)
# Plot 2: Cell area comparison across precisions
ax2 = axes[0, 1]
ax2.set_title("Cell Areas by Precision Level")
ax2.set_xlabel("Precision Level")
ax2.set_ylabel("Cell Area (km²)")
ax2.set_yscale("log")
# Calculate areas for different precisions
precision_ranges = {
"Plus Codes": range(1, 6),
"Maidenhead": range(1, 5),
"GARS": range(1, 4),
}
grid_classes = {
"Plus Codes": PlusCodeGrid,
"Maidenhead": MaidenheadGrid,
"GARS": GARSGrid,
}
for i, (name, precisions) in enumerate(precision_ranges.items()):
areas = []
precision_levels = []
for precision in precisions:
try:
grid = grid_classes[name](precision=precision)
cell = grid.get_cell_from_point(center_lat, center_lon)
areas.append(cell.area_km2)
precision_levels.append(precision)
except Exception as e:
print(
f"Warning: Could not get area for {name} precision {precision}: {e}"
)
continue
if areas:
ax2.plot(
precision_levels,
areas,
"o-",
color=colors[i],
linewidth=2,
markersize=6,
label=name,
)
ax2.legend()
ax2.grid(True, alpha=0.3)
# Plot 3: Grid density comparison (cells per unit area)
ax3 = axes[1, 0]
ax3.set_title("Grid Density Comparison")
ax3.set_xlabel("Grid System")
ax3.set_ylabel("Number of Cells in Test Area")
cell_counts = []
grid_names = []
for name, grid in grids.items():
try:
cells = grid.get_cells_in_bbox(*bounds)
cell_counts.append(len(cells))
grid_names.append(name)
except Exception as e:
print(f"Warning: Could not count cells for {name}: {e}")
continue
if cell_counts:
bars = ax3.bar(
grid_names, cell_counts, color=colors[: len(cell_counts)], alpha=0.7
)
ax3.set_ylim(0, max(cell_counts) * 1.1)
# Add value labels on bars
for bar, count in zip(bars, cell_counts):
ax3.text(
bar.get_x() + bar.get_width() / 2,
bar.get_height() + max(cell_counts) * 0.01,
str(count),
ha="center",
va="bottom",
fontweight="bold",
)
ax3.grid(True, alpha=0.3)
# Plot 4: Individual grid system details
ax4 = axes[1, 1]
ax4.set_title("Grid System Characteristics")
ax4.axis("off")
# Create text summary of grid characteristics
characteristics = {
"Plus Codes": {
"Full Name": "Open Location Code",
"Developed by": "Google",
"Cell Shape": "Rectangular",
"Precision Range": "1-11",
"Use Case": "Address replacement",
},
"Maidenhead": {
"Full Name": "Maidenhead Locator System",
"Developed by": "Amateur Radio",
"Cell Shape": "Rectangular",
"Precision Range": "1-8",
"Use Case": "Ham radio communication",
},
"GARS": {
"Full Name": "Global Area Reference System",
"Developed by": "NGA (formerly NIMA)",
"Cell Shape": "Rectangular",
"Precision Range": "1-3",
"Use Case": "Military/government mapping",
},
}
y_pos = 0.9
for name, details in characteristics.items():
ax4.text(
0.05,
y_pos,
f"{name}:",
fontsize=12,
fontweight="bold",
transform=ax4.transAxes,
color=colors[list(characteristics.keys()).index(name)],
)
y_pos -= 0.06
for key, value in details.items():
ax4.text(
0.1, y_pos, f"{key}: {value}", fontsize=10, transform=ax4.transAxes
)
y_pos -= 0.05
y_pos -= 0.03
plt.tight_layout()
plt.savefig("new_grids_comparison.png", dpi=150, bbox_inches="tight")
print("Grid comparison plots saved as 'new_grids_comparison.png'")
plt.show()
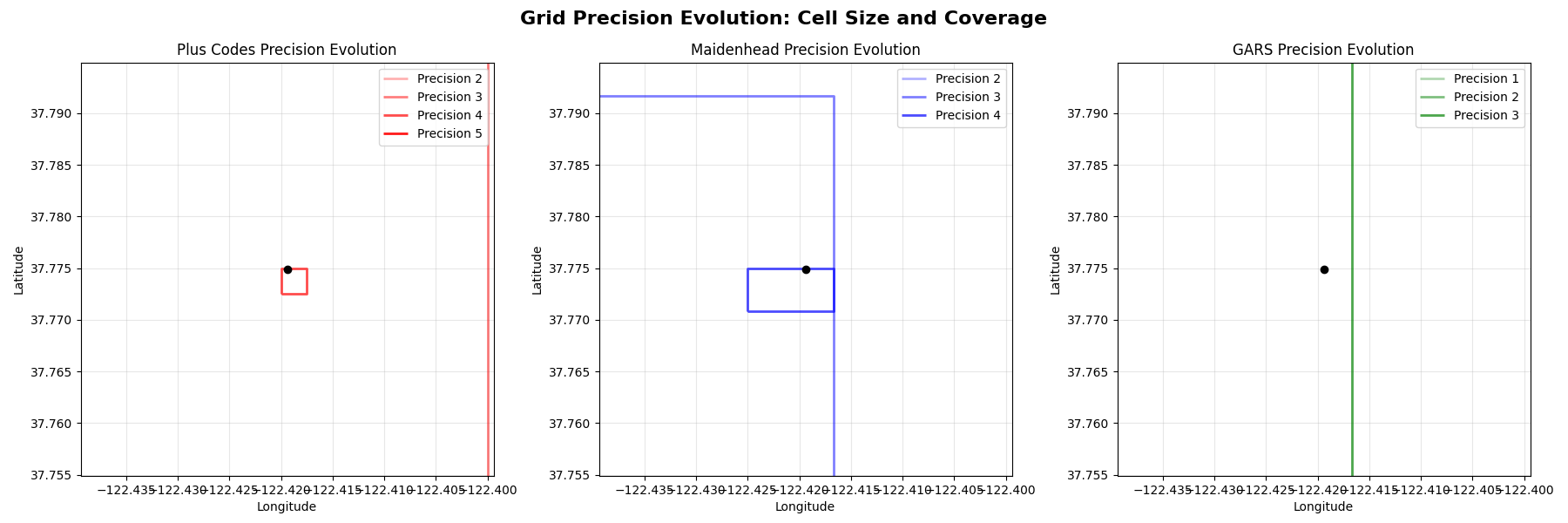
def plot_precision_evolution():
"""Create plots showing how grid precision affects cell size and coverage."""
print("\n=== Creating Precision Evolution Plots ===")
# Test coordinates
center_lat, center_lon = 37.7749, -122.4194
fig, axes = plt.subplots(1, 3, figsize=(18, 6))
fig.suptitle(
"Grid Precision Evolution: Cell Size and Coverage",
fontsize=16,
fontweight="bold",
)
colors = ["red", "blue", "green"]
grid_systems = [
("Plus Codes", PlusCodeGrid, range(2, 6)),
("Maidenhead", MaidenheadGrid, range(2, 5)),
("GARS", GARSGrid, range(1, 4)),
]
for idx, (name, grid_class, precision_range) in enumerate(grid_systems):
ax = axes[idx]
ax.set_title(f"{name} Precision Evolution")
ax.set_xlabel("Longitude")
ax.set_ylabel("Latitude")
# Plot different precision levels
for precision in precision_range:
try:
grid = grid_class(precision=precision)
cell = grid.get_cell_from_point(center_lat, center_lon)
# Create GeoDataFrame for this cell
gdf = gpd.GeoDataFrame([{"geometry": cell.polygon}])
# Plot with different alpha based on precision
alpha = 0.3 + (precision - min(precision_range)) * 0.2
gdf.boundary.plot(
ax=ax,
color=colors[idx],
alpha=alpha,
linewidth=2,
label=f"Precision {precision}",
)
except Exception as e:
print(f"Warning: Could not plot {name} precision {precision}: {e}")
continue
# Add center point
ax.plot(center_lon, center_lat, "ko", markersize=6)
ax.legend()
ax.grid(True, alpha=0.3)
# Set reasonable bounds around the center point
offset = 0.02
ax.set_xlim(center_lon - offset, center_lon + offset)
ax.set_ylim(center_lat - offset, center_lat + offset)
plt.tight_layout()
plt.savefig("precision_evolution.png", dpi=150, bbox_inches="tight")
print("Precision evolution plots saved as 'precision_evolution.png'")
plt.show()
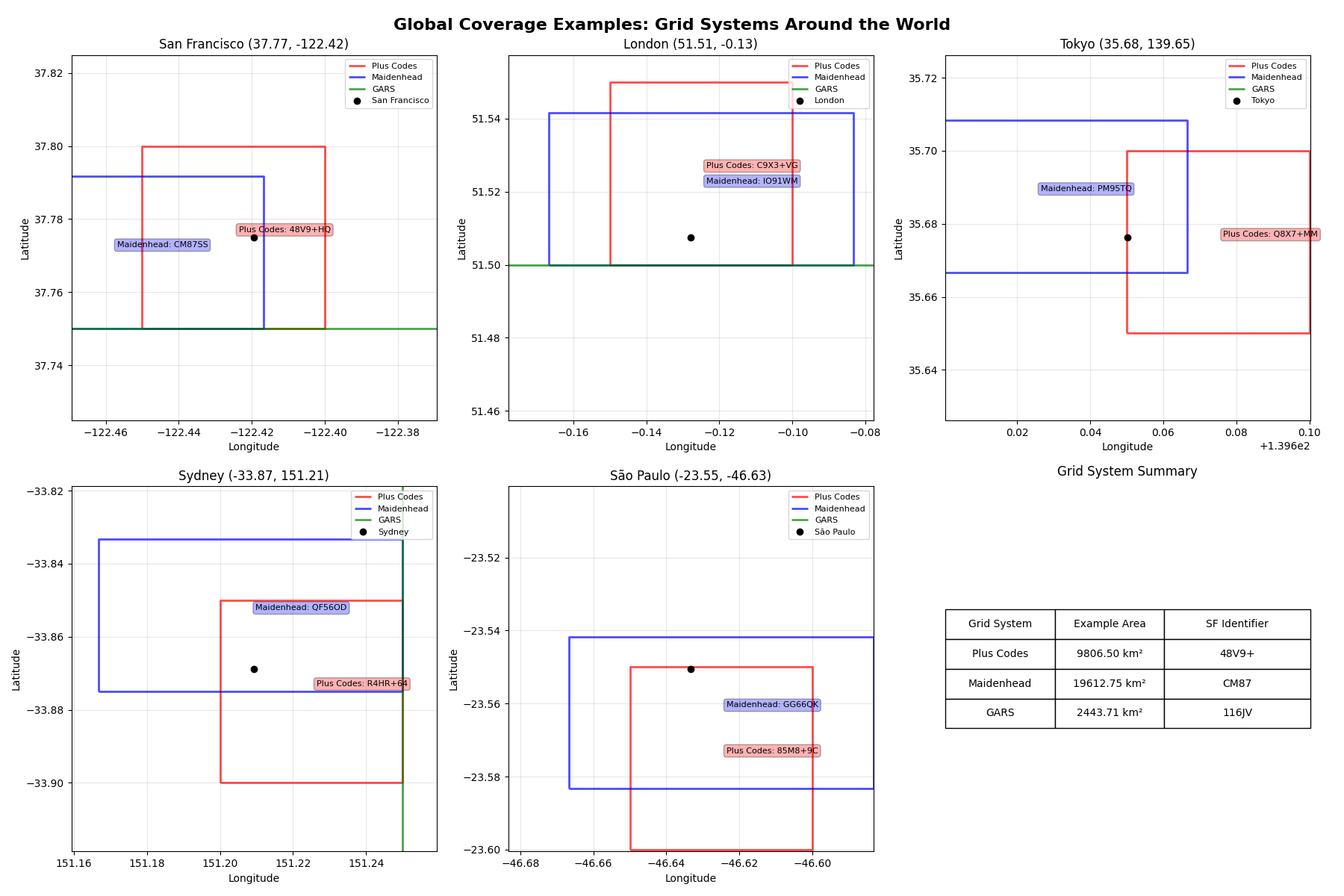
def plot_global_coverage():
"""Create a plot showing global coverage examples of the grid systems."""
print("\n=== Creating Global Coverage Examples ===")
# Define interesting global locations
locations = {
"San Francisco": (37.7749, -122.4194),
"London": (51.5074, -0.1278),
"Tokyo": (35.6762, 139.6503),
"Sydney": (-33.8688, 151.2093),
"São Paulo": (-23.5505, -46.6333),
}
fig, axes = plt.subplots(2, 3, figsize=(18, 12))
fig.suptitle(
"Global Coverage Examples: Grid Systems Around the World",
fontsize=16,
fontweight="bold",
)
# Flatten axes for easier iteration
axes_flat = axes.flatten()
# Create one subplot per location
for idx, (city, (lat, lon)) in enumerate(locations.items()):
if idx >= len(axes_flat):
break
ax = axes_flat[idx]
ax.set_title(f"{city} ({lat:.2f}, {lon:.2f})")
ax.set_xlabel("Longitude")
ax.set_ylabel("Latitude")
colors = ["red", "blue", "green"]
grids = [
("Plus Codes", PlusCodeGrid(precision=3)),
("Maidenhead", MaidenheadGrid(precision=3)),
("GARS", GARSGrid(precision=2)),
]
offset = 0.05
bounds = (lon - offset, lat - offset, lon + offset, lat + offset)
for i, (name, grid) in enumerate(grids):
try:
# Get the cell containing this location
cell = grid.get_cell_from_point(lat, lon)
gdf = gpd.GeoDataFrame([{"geometry": cell.polygon}])
gdf.boundary.plot(
ax=ax, color=colors[i], alpha=0.7, linewidth=2, label=name
)
# Add cell identifier as text
centroid = cell.polygon.centroid
ax.annotate(
f"{name}: {cell.identifier}",
xy=(centroid.x, centroid.y),
xytext=(5, 5),
textcoords="offset points",
fontsize=8,
bbox={"boxstyle": "round,pad=0.3", "fc": colors[i], "alpha": 0.3},
)
except Exception as e:
print(f"Warning: Could not plot {name} for {city}: {e}")
continue
# Add location point
ax.plot(lon, lat, "ko", markersize=6, label=city)
ax.legend(fontsize=8)
ax.grid(True, alpha=0.3)
ax.set_xlim(bounds[0], bounds[2])
ax.set_ylim(bounds[1], bounds[3])
# Use the last subplot for summary statistics
if len(locations) < len(axes_flat):
ax_summary = axes_flat[-1]
ax_summary.set_title("Grid System Summary")
ax_summary.axis("off")
# Create summary table
summary_data = []
for name, grid_class in [
("Plus Codes", PlusCodeGrid),
("Maidenhead", MaidenheadGrid),
("GARS", GARSGrid),
]:
try:
grid = grid_class(precision=2 if name != "GARS" else 1)
cell = grid.get_cell_from_point(37.7749, -122.4194) # SF coordinates
summary_data.append([name, f"{cell.area_km2:.2f} km²", cell.identifier])
except Exception:
summary_data.append([name, "Error", "N/A"])
# Create table
table = ax_summary.table(
cellText=summary_data,
colLabels=["Grid System", "Example Area", "SF Identifier"],
cellLoc="center",
loc="center",
colWidths=[0.3, 0.3, 0.4],
)
table.auto_set_font_size(False)
table.set_fontsize(10)
table.scale(1, 2)
plt.tight_layout()
plt.savefig("global_coverage.png", dpi=150, bbox_inches="tight")
print("Global coverage plots saved as 'global_coverage.png'")
plt.show()
if __name__ == "__main__":
main()
# Create comprehensive visualizations
plot_grid_systems_comparison()
plot_precision_evolution()
plot_global_coverage()
print("\n" + "=" * 60)
print("New Grids Example completed successfully!")
print("Generated visualization files:")
print("- new_grids_comparison.png")
print("- precision_evolution.png")
print("- global_coverage.png")
print("=" * 60)
Total running time of the script: (0 minutes 9.514 seconds)